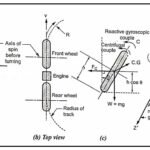
Like a four wheel vehicle, a two wheel vehicle will also be subjected to gyroscopic and centrifugal couple when it takes a turn on a curved path.
Let us consider a two wheel vehicle, (say, a scooter or a motor bicycle) taking a right turn, as shown in fig.

Let, m = Mass of the vehicle and its rider in kg,
W = mg = Weight of the vehicle and its rider in newtons,
rW = Radius of the wheels in metres,
R = Radius of track or curvature in metres,
h = Height of the centre of gravity of the vehicle and rider in metres,
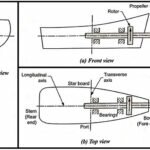
IW = Mass moment of inertia of each wheel in kg-m²
IE = Mass moment of inertia of the rotating parts of the engine in kg-m²,
ωW = Angular velocity of the wheels in rad/s = v/rW
ωE = Angular velocity of precession in red/s
ωP = Angular velocity of precession in rad/s = v/R
G = Gear ratio = ωE/ωW,
v = Linear velocity of the vehicle in m/s = rW ωW, and
θ = Angle of heel in degrees.
The angle of inclination of the vehicle to the vertical (when the vehicle tilts inward during a turn) is known as the angle of heel.
As in four wheel vehicle, the two wheel vehicle is also subjected to the following three loads when it is moving alone the curved path:
- Weight of the vehicle (W),
- Reactive gyroscopic couple (C),
- Centrifugal force (FC).
Weight of the vehicle
The weight of the vehicle W acts vertically downloads through the centre of gravity of the vehicle shown in fig.
Effect of gyroscopic couple
Gyroscopic couple due to the two wheels, CW = 2 . IW . ωW . ωP and gyroscopic couple due to the rotating parts of the engine is given by CE = IE . ωE . ωP
∴ Total gyroscopic couple, C = CW + CE
= 2 . IW . ωW . ωP . ± IE . ωE . ωP
= 2 . IW . ωW . ωP . ± IE . G . ωW . ωP ∵ [G = ωE/ωW]
C = ωW . ωP (2 . IW ± G.IE)
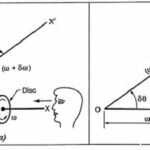
This above said result is applicable only when there is no inclination to the vehicle. But in this case, the angle of heel ‘θ’ is given. Since the axis of spin is inclined to vertical at an angle of θ while turning and this axis of precession is vertical fig (d), therefore the horizontal component of spin vector (IW cos θ) is responsible for producing the reactive gyroscopic couple.
∴ Total gyroscopic couple, C1 = ωW . ωP (2 . IW ± G . IE) cos θ
\begin{aligned} &=\frac{\nu}{r_{w}} \times \frac{v}{R}\left(2 I_{w} \pm G \cdot I_{E}\right) \cos \theta \\ C_{1}=\frac{v^{2}}{r_{W} \cdot R}\left(2 I_{w} \pm G \cdot I_{E}\right) \cos \theta \end{aligned}In the above expression, the positive sign is used when the engine rotor and wheels rotate in the same sense and the negative sign is used when the engine rotors and wheels rotate in opposite direction.
Effect of centrifugal couple
We know that the centrifugal force acts horizontally through the centre of gravity along the outward direction.
∴ Centrifugal couple \quad \mathrm{C}_{2}=\mathrm{F}_{\mathrm{C}} \times h \cos \theta=\left(\frac{m \cdot v^{2}}{\mathrm{R}}\right) h \cos \theta
Both the gyroscopic and the centrifugal couple will have the tendency to overturn the vehicle in the outward direction.
∴ Total overturning couple,
CO = Gyroscopic couple (C1) + Centrifugal couple (C2)
[∵ Both couples act in the same direction]
=\frac{v^{2}}{r_{\mathrm{w}} \cdot \mathrm{R}}\left(2 \mathrm{I}_{\mathrm{w}}+\mathrm{G} \cdot \mathrm{I}_{\mathrm{E}}\right) \cos \theta+\left(\frac{m \cdot v^{2}}{\mathrm{R}}\right) h \cos \theta \\ \mathrm{C}_{\mathrm{O}}=\frac{v^{2}}{\mathrm{R}}\left[\frac{2 \cdot \mathrm{I}_{\mathrm{W}}+\mathrm{G} \cdot \mathrm{I}_{\mathrm{E}}}{r_{\mathrm{W}}}+m \cdot h\right] \cos \theta \midConclusion: We know that the balancing couple = m . g . h sin θ is offered by the component of the weight of the vehicle with its rider. For stability, the overturning couple must be equal to this balancing couple.
\therefore {\frac{v^{2}}{\mathrm{R}}\left[\frac{2 \cdot \mathrm{I}_{\mathrm{W}}+\mathrm{G} \cdot \mathrm{I}_{\mathrm{E}}}{r_{\mathrm{w}}}+m \cdot h\right] \cos \theta=m \cdot g \cdot h \sin \theta}With the help of above expression, one can find value of angle of heel ‘θ’ so that the vehicle does not skid, while taking the turn.
- See More : Stability of four wheel moving
- See More : Precessional angular motion
- See More : Four type of vibration